|
|
| Ricerca |
|
Accoppiamento di Sottostrutture (Virtual Ptototyping)
Attuatori a Muscolo Pneumatico Attuatori in Leghe a Memoria di Forma (LMF) Bioingegneria Correzione (updating) del Modello EF Modifica Strutturale Robotica |
|
|
| Bioingengeria |
|||||||||||||||||||
|
Braccio riabilitazione arto superiore
Ortesi arto inferiore Corsetto per la misura delle azioni di distrazione Ortesi arto superiore Divaricatore per chirurgia proctologica
Il robot per riabilitazione ha 2 gradi di libertŕ ed č controllato nei movimenti mediante un sistema di controllo basato su logica “fuzzy”. Le specifiche tecniche sono:
La trasmissione ha una architettura in cui gli attuatori sono
in configurazione agonista-antagonista. La trasmissione scelta
č del tipo a “cinghia e puleggia dentata”. Sono previste due
coppie di attuatori per ogni giunto. Per il giunto della spalla
sono previsti muscoli a 4 segmenti mentre per il giunto del
gomito muscoli a 3 segmenti.  
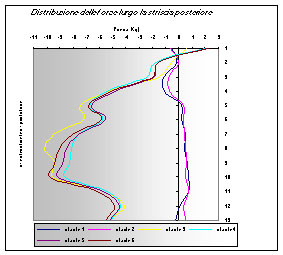
Ortesi arto inferiore
L'ortesi sviluppata consente il sollevamento, da posizione seduta, di disabili o anziani il cui tono muscolare non permette l'esecuzione di questa operazione. E' stata posta particolare attenzione a:
•contenimento degli ingombri per consentire una corretta deambulazione e la possibilitŕ di calzare l’ortesi al di sotto degli indumenti; •progettazione di muscoli pneumatici di McKibben combinati con una molla di trazione al loro interno per migliorare le prestazioni; •sviluppo di cerniere per garantire che il braccio delle forze esercitate dai muscoli rimanga costante durante il funzionamento.  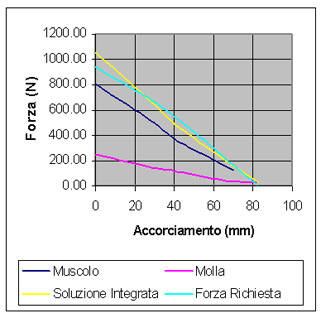
Corsetto per la misura delle azioni di distrazione
Il lavoro č indirizzato ad una indagine conoscitiva del comportamento di un busto per rachide, con lo scopo di:
•evidenziare lo stato tensionale che si instaura all’interno del corsetto durante il suo funzionamento; •risalire alle modalitŕ dell’azione di scarico del rachide ad opera del busto; •correlare l’effetto di assorbimento del carico alla forza di serraggio del corsetto.
Ortesi arto superiore
Il prototipo di ortesi di arto superiore sviluppato č in grado di aiutare persone affette da patologie che compromettono la mobilitŕ dell’arto a riacquistare una mobilitŕ sufficiente a svolgere operazioni elementari come il bere, il mangiare,... L’ortesi č dotata di 4 gradi di libertŕ ed č azionata da attuatori a muscolo pneumatico montati in configurazione agonista-antagonista. L'ampiezza dei movimenti permessi dall’ortesi č riportata nel seguito:
•flessione/estensione del gomito, ampiezza di 150°; •flessione/estensione della spalla, ampiezza di 90°; •abduzione/adduzione della spalla, ampiezza di 90°; •rotazione della spalla, ampiezza di 90°; Le specifiche richieste dell' ortesi definite in fase di progetto sono: ergonomicitŕ, architettura antropomorfa, leggerezza, sicurezza, ingombro limitato, idoneitŕ alla movimentazione di piccoli carichi. L' ortesi ha un peso di 4.6 kg. 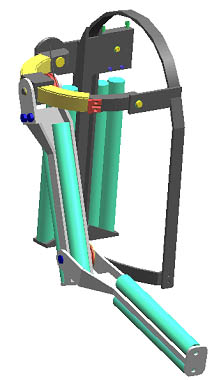 
Divaricatore per chirurgia proctologica
Il prototipo realizzato consente la divaricazione del muscolo sfinterico del canale anale rendendo accessibile la zona interna per un efficace trattamento chirurgico delle varie patologie. Lo strumento č autoreggente, č realizzato in materiale plastico monouso, č costituito da un numero di componenti contenuto, e prevede due movimenti delle valve: la rotazione di 360° intorno all’asse del canale, per servire tutta la superficie interna dell’ano, ed il movimento radiale per consentire la divaricazione. Ha, inoltre, la possibilitŕ di essere rapidamente applicato sul paziente e consente facilmente l’introduzione, fuoriuscita dall’ano. Le prove di validazione clinica hanno dato esito positivo confermando la bontŕ del progetto. Le principali specifiche tecniche sono:
•forza di dilatazione di circa 60N; •apertura massima di divaricazione di 60mm; •profonditŕ media valve pari a 60-70mm; •forma valve: rotondeggiante, atraumatica; •dimensioni di ingombro in pianta pari a 200mm. 
|