|
|
| Ricerca |
|
Accoppiamento di Sottostrutture (Virtual Ptototyping)
Attuatori a Muscolo Pneumatico Attuatori in Leghe a Memoria di Forma (LMF) Bioingegneria Correzione (updating) del Modello EF Modifica Strutturale Robotica |
|
|
| Attuatori in Leghe a Memoria di Forma (LMF) |
||||
|
INTRODUZIONE
 Le leghe a memoria di forma (generalmente leghe Ni-Ti) presentano la capacitŕ, inusuale per
altri tipi di materiali, di "ricordare" la propria forma originale.
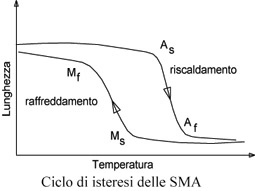
Questo comportamento meccanico č correlato ad una trasformazione
della struttura cristallina che si verifica all'interno della lega.
Tale trasformazione converte il reticolo cristallino stabile ad alta
temperatura (fase austenitica) in uno stabile a bassa temperatura
(fase martensitica). A bassa temperatura questi materiali sono
facilmente deformabili mentre riscaldandoli si ha la trasformazione
della martensite in austenite ed in questa fase il materiale sviluppa
notevoli forze recuperando la sua forma originale. La trasformazione č accompagnata
da isteresi. Questi materiali
sono disponibili in svariate forme come nastri, lamine, fili ed
elicoidi. Per i fili le deformazioni reversibili ottenibili sono
del 5% - 8% e le tensioni massime sviluppabili arrivano a circa
200 MPa. Per fornire energia termica č possibile utilizzare l’effetto
Joule mediante attraversamento di corrente elettrica.
Le leghe a memoria di forma (generalmente leghe Ni-Ti) presentano la capacitŕ, inusuale per
altri tipi di materiali, di "ricordare" la propria forma originale.
Questo comportamento meccanico č correlato ad una trasformazione
della struttura cristallina che si verifica all'interno della lega.
Tale trasformazione converte il reticolo cristallino stabile ad alta
temperatura (fase austenitica) in uno stabile a bassa temperatura
(fase martensitica). A bassa temperatura questi materiali sono
facilmente deformabili mentre riscaldandoli si ha la trasformazione
della martensite in austenite ed in questa fase il materiale sviluppa
notevoli forze recuperando la sua forma originale. La trasformazione č accompagnata
da isteresi. Questi materiali
sono disponibili in svariate forme come nastri, lamine, fili ed
elicoidi. Per i fili le deformazioni reversibili ottenibili sono
del 5% - 8% e le tensioni massime sviluppabili arrivano a circa
200 MPa. Per fornire energia termica č possibile utilizzare l’effetto
Joule mediante attraversamento di corrente elettrica.
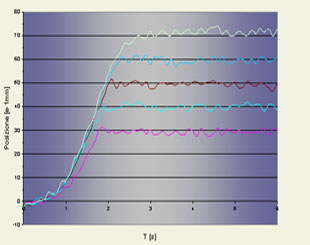
ATTUATORE CON SENSORE DEDICATO E' stato sviluppato un attuatore con Leghe a Memoria di Forma filiformi. L’attuatore effettua il posizionamento continuo mediante un sistema di controllo in catena chiusa. 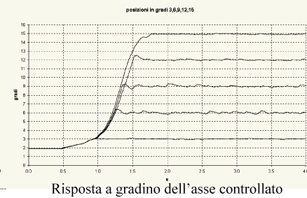 La potenza termica viene generata per effetto Joule facendo attraversare
da corrente elettrica gli attuatori stessi. Il controllo č di tipo
proporzionale e si avvale del segnale di retroazione di un sensore di
posizione a resistenza. E' stato realizzato un controller software che
pilota una scheda di acquisizione dati. In uscita si utilizza un
counter/timer in grado di fornire un segnale tipo treno di impulsi
con modulazione di ampiezza (PWM). In ingresso, per il rilievo della
posizione, viene utilizzato un convertitore analogico digitale a 16 bit.
Per fornire la potenza č stato realizzato un circuito con
fotoaccoppiatore, che abilita il flusso di potenza da un alimentatore
all'attuatore, pilotato a bassa potenza dal counter/timer. In figura č
riportata la risposta a gradino di un asse controllato per differenti
valori del riferimento.
La potenza termica viene generata per effetto Joule facendo attraversare
da corrente elettrica gli attuatori stessi. Il controllo č di tipo
proporzionale e si avvale del segnale di retroazione di un sensore di
posizione a resistenza. E' stato realizzato un controller software che
pilota una scheda di acquisizione dati. In uscita si utilizza un
counter/timer in grado di fornire un segnale tipo treno di impulsi
con modulazione di ampiezza (PWM). In ingresso, per il rilievo della
posizione, viene utilizzato un convertitore analogico digitale a 16 bit.
Per fornire la potenza č stato realizzato un circuito con
fotoaccoppiatore, che abilita il flusso di potenza da un alimentatore
all'attuatore, pilotato a bassa potenza dal counter/timer. In figura č
riportata la risposta a gradino di un asse controllato per differenti
valori del riferimento.
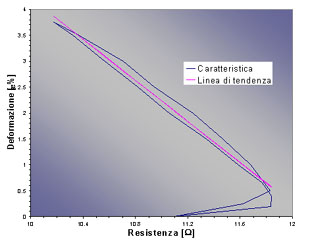
ATTUATORE CON EFFETTO SENSORE INTRINSECO E' stato sviluppato un attuatore con Leghe a Memoria di Forma filiformi per il posizionamento continuo mediante un sistema di controllo in catena chiusa senza sensore esterno per il rilievo della posizione. In questo caso č stato utilizzato il cosiddetto effetto sensore intrinseco del materiale che, per i fili in LMF, consiste in un legame lineare tra resistenza elettrica del filo e lunghezza del filo stesso. Data questa caratteristica č possibile conoscere la lunghezza dell’attuatore mediante un amisura di resistenza elettrica. La potenza termica viene generata per effetto Joule e il controllo č di tipo proporzionale. Il controller pilota una scheda di acquisizione dati. In uscita si utilizza un counter/timer in grado di fornire un segnale a modulazione di ampiezza (PWM). In ingresso, per la misura della resistenza elettrica del filo LMF viene utilizzato un convertitore analogico digitale a 16 bit.
|