
|
|
| Ricerca |
|
Accoppiamento di Sottostrutture (Virtual Ptototyping)
Attuatori a Muscolo Pneumatico Attuatori in Leghe a Memoria di Forma (LMF) Bioingegneria Correzione (updating) del Modello EF Modifica Strutturale Robotica |
|
|
| Robotica |
||||||||||
|
Mano di presa con attuatori in Leghe a Memoria di Forma (LMF)
Robot SCARA a struttura flessibile Robot parallelo ad azionamento pneumatico Robot parallelo con attuatori in Leghe a Memoria di Forma Robot parallelo con attuatori in LMF con sensore intrinseco
La soluzione costruttiva per la realizzazione del meccanismo
consiste in un telaio a cui sono vincolati gli elementi mobili.
Gli attuatori in SMA sono in numero di 4 in una disposizione
simmetrica per evitare coppie di rotazione che aumenterebbero le
forze di attrito tra slitta e guida. Per il bloccaggio degli attuatori
in SMA sul telaio e sulla slitta sono stati sviluppati appositi sistemi
di fissaggio regolabili. Le dita hanno la particolaritŕ di essere
regolabili in funzione della dimensione dell'oggetto da afferrare.
Le molle vengono bloccate sulle guide mediante due fermi regolabili
per permettere regolazioni per il corretto funzionamento.
La mano č stata realizzata in materiali leggeri, Alluminio e Nylon, per limitare i pesi. Sono previsti polpastrelli rivestiti in gomma per migliorare le condizioni di presa. Le dimensioni di ingombro sono 19 mm x 60 mm x 80 mm. Il comando della pinza avviene con il passaggio di corrente elettrica attraverso gli attuatori che sviluppano la potenza termica necessaria alla deformazione per effeto Joule. Sono state effettuate verifiche sperimentali delle capacitŕ di presa della pinza. Sono stati comandati afferraggi di oggetti a facce parallele e oggetti cilindrici di diverse dimensioni e pesi. 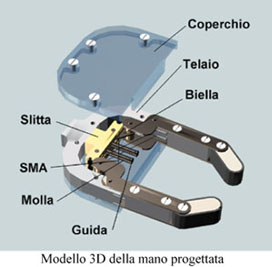 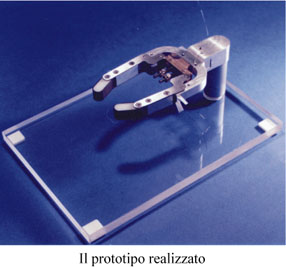
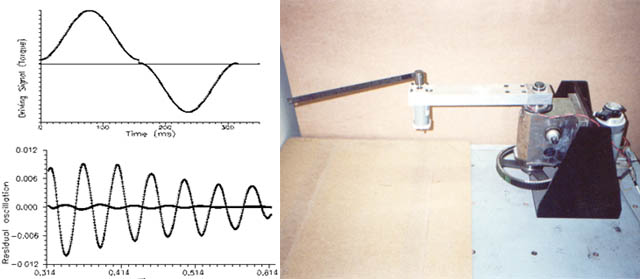
Robot SCARA a struttura flessibile
L’obiettivo č il miglioramento delle prestazioni dei bracci di robot
cercando tempi di posizionamento brevissimi. In questi casi il controllo
classico va in crisi per l’impossibilitŕ di controllare le vibrazioni
strutturali. E’ possibile adottare strategie di controllo innovative
che tengano in conto il comportamento a vibrazione della struttura e
che permettano posizionamenti veloci senza l’insorgenza di vibrazioni.
E’ stata individuata una opportuna legge cinematica da applicare al
mozzo del link flessibile la quale č in grado di attuare posizionamenti
brevi (tempo = 2 periodo fondamentale della struttura) con notevole
riduzione delle oscillazioni a fine posizionamento.
Nella figura in alto č riportata la legge di coppia da applicare al
mozzo e nella figura in basso č riportato il confronto tra le
oscillazioni a fine posizionamento che si manifestano con una legge di
controllo classico e con il metodo proposto.
Si nota una riduzione di circa 20 volte del picco-picco dell’oscilazione.
Robot parallelo ad azionamento pneumatico
Il robot ha una architettura cinematica parallela ed č azionato
con attuatori pneumatici tradizionali. Il sistema di controllo č
basato su logica Fuzzy. E' una macchina e 3 gradi di libertŕ (GDL)
con dimensioni di ingombro di circa 2m x 0.8m x 1m. Il volume di
lavoro ha forma "lenticolare". E’ stata effettuata una
caratterizzazione statica del robot.
Mediante un riscontro triedrale fisso sensorizzato č stato
possibile caratterizzare la precisione di posizionamento e la
ripetibilitŕ del robot. Sono risultate:
Precisione di posizionamento: 2mm Ripetibilitŕ di posizionamento: 5.6 mm E’ stato messo a punto un modello per la previsione del comportamento dinamico del robot. Il modello č stato verificato sperimentalmente attraverso misure delle frequenze proprie della struttura nei diversi punti all’interno del volume di lavoro. Il modello validato sperimentalmente č stato utilizzato per sviluppare mappature, sul volume di lavoro, delle frequenze proprie del robot. 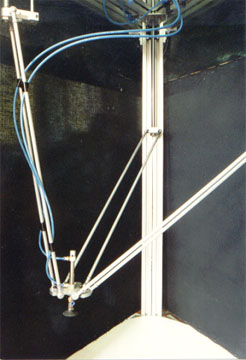 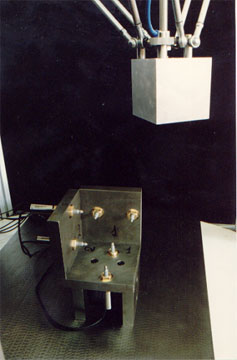
Robot parallelo con attuatori in Leghe a Memoria di Forma
L'obiettivo di questo studio č la realizzazione di un piccolo
manipolatore a 3 gdl con struttura cinematica parallela
utilizzabile come dispositivo di orientamento o per la
manipolazione di piccoli oggetti. Il robot ha un ingombro
di 180mm x 100mm x 100mm e un volume di lavoro di forma
"lenticolare" dell'altezza di 2 mm e diametro di 24 mm.
Per i movimenti sono stati
utilizzati fili in Lega a Memoria di Forma (LMF) in Ni-Ti del
diametro di 150 micron. La struttura cinematica č parallela
e i fili vengono mantenuti in tensione mediante una molla interposta
tra la base e la piattaforma. E' stato messo a punto un sistema
di controllo in catena chiusa. La potenza termica viene generata
per effetto Joule facendo attraversare da corrente elettrica gli
attuatori stessi. Il controllo č di tipo proporzionale e si
avvale del segnale di retroazione di un sensore di posizione
a resistenza. L'architettura cinematica prevede gli attuatori
collegati alla base mediante cerniere cilindriche disposte
a 120° e alla piattaforma con cerniere sferiche. Questa soluzione
č stata tradotta costruttivamente realizzando gli attuatori a
forma di triangolo isoscele. Questa
configurazione oltre a fornire una semplice soluzione costruttiva
alle specifiche funzionali, permette anche una amplificazione del
movimento degli attuatori. Sulla base del progetto č stato
realizzato il prototipo del robot.
Sono state effettuate delle verifiche preliminari dei movimenti
dei singoli assi e di inseguimento di traiettorie che richiedono
il controllo coordinato di tutti e tre gli assi.
Video del manipolatore (8Mb) 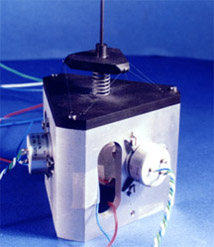
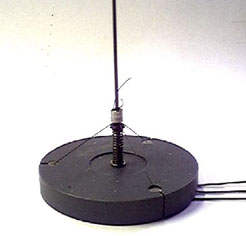
Robot parallelo con attuatori in LMF con sensore intrinseco
L'obiettivo č stato la realizzazione di un manipolatore, di ridotte
dimensioni, a tre gradi di libertŕ. Per l'azionamento sono stati utilizzati fili in LMF
e il sistema di controllo retroazionato utilizza l'effetto sensore intrinseco
del materiale. In questo modo č stato possibile realizzare una struttura con ingombri ridotti.
Sono stati effetuate movimentazioni dei singoli assi e movimenti coordinati che coinvolgono tutti gli assi
contemporaneamente. Nella figura in basso č riportato il prototipo realizzato.
|