|
|
| Research |
|
Virtual Prototyping
Pneumatic Muscle Actuators Shape Memory Alloys (SMA) Actuators Bioengineering Finite Element Model Updating Structural Modifications Robotics |
|
|
| Bioengineering |
|||||||||||||||||
|
Rehabilitation Robot for Upper Limb
Lower Limb Orthosis Corset for the measure of the distraction’s actions Upper Limb Orthosis Retractor for proctologic surgery
Rehabilitation Robot for Upper Limb
The robot for rehabilitation has 2-dof (degrees of freedom)
and it’s implemented a position and trajectory control by
“fuzzy” logic. The specific techniques are:
• anthropomorphic structure and likeness of human limb; • 2 modes of exercice: active and passive-constrained; • force producible from the machine: 20N; • good compliance for safety purposes; • Machine easily acceptable from the patient from the psychological point of view; • friendly interface; • not expensive. The transmission has an architecture in which the actuators are in configuration agonistic-antagonist. The select transmission is of the type to “timing belt and pulley”. There are two couples of actuators for every joint. For the joint of the shoulder there are muscles to 4 segments while for the joint of the elbow muscles to 3 segments. Video of the Rehabilitation Robot (10 Mb)  
Lower Limb Orthosis
The orthosis is developed to help to stand up and to sit down on a seat
the disabled and elderly people whose muscular tone doesn't allow the
execution of this operation. And' sets particular attention to:
•control of the encumbrances to allow a correct ambulation and the possibility to put on the ortesi below the garments; •design of pneumatic muscles of McKibben combined with a extension spring to improve the performances; •development of hinge joint to guarantee that the strengths' arm practiced by the muscles is constant during the operation.  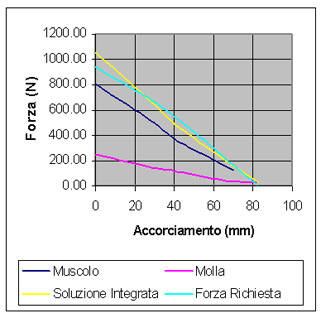
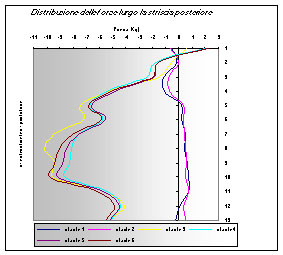
Corset for the measure of the distraction’s actions
The job is addressed to cognitive investigation of the behavior of a bust for rachis, with the purpose of:
• to point out the tensional state that is established inside the corset during his operation; • to trace to the formalities of the action of unloading of the rachis to work of the bust; • to correlate the effect of absorption of the load to the clamping’s strength of the corset.
Upper-limb Orthosis
The prototype of powered upper-limb orthosis is able to help people
with disabilities and pathologies that jeopardize the mobility of
the limb to repurchase an enough mobility to develop elementary
operations as to drink, the to eat,... The orthosis is endowed with
4 degrees of freedom and it’s operated by pneumatic muscle actuators
(PMA) in agonist-antagonist configuration. The ampleness of the
movements allowed by the orthosis is:
• bending/extension of the elbow, ampleness of 150°; • bending/extension of the shoulder, ampleness of 90°; • abduction/adduction of the shoulder, ampleness of 90°; • rotation of the shoulder, ampleness of 90°; The specific applications of the orthosis defined in phase of project are: ergonomics, anthropomorphic architecture, lightness, safety, limited encumbrance, ability to the motion of small loads. The orthosis has a weight of 4.6 kg. 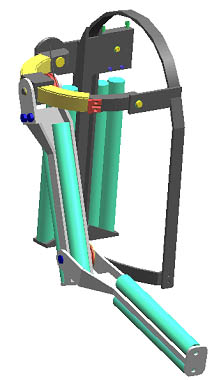 
Retractor for proctologic surgery
The realized prototype allows the divarication of the sphincteric
muscle of the duct anal making the inside zone accessible for an
effective surgical treatment of the various pathologies. The tool
is stay-up, it’s realized in plastic material disposable, is constituted
by a contained number of components, and it foresees two movements
of the valves: the rotation of 360° around the axle of the canal,
to serve the whole inside surface of the anus and the radial movement
to allow the divarication. It has, besides, the possibility to
quickly be applied on the patient and it easily allows the introduction,
escaped by the anus. The tests of clinical validation have given
positive result confirming the goodness of the project. The principal
specific techniques are:
• expansion force, around 60N; • maximum open of divarication of 60mm; • middle profundity valve equal to 60-70mm; • shape valve: roundish, atraumatica; • dimensions of encumbrance in plant equal to 200mm. 
|