|
|
| Research |
|
Virtual Prototyping
Pneumatic Muscle Actuators Shape Memory Alloys (SMA) Actuators Bioengineering Finite Element Model Updating Structural Modifications Robotics |
|
|
| Pneumatic Muscle Actuators |
||||
|
The first pneumatic muscle was patented in the years '50 under the
name of muscle McKibben and already in the years '60 was applied
in searches concerning artificial arts. The muscle McKibben is realized
through a tube in rubber dressed with a net of wire very rigid and
closed to the extremities with metallic heads. When the internal tube
is pressurized the interaction between tube and net involves a diametral
growth and a shortening of the muscle. Peculiar characteristics of the
pneumatic muscles are: lightness, pliability and behaviour strongly not
linear. Another type of pneumatic muscle has been proposed by a group
of search of the university in Warsaw. The muscle is realized through
a tube in rubber, inside that there are axial high resistance cables.
The tube is closed with metallic head. When the internal tube is
pressurized growth of the diametrical dimension and a contemporary
shortening of the muscle is had. To limit the diametrical deformations
it’s used rigid rings. In the university of L’Aquila the idea of the
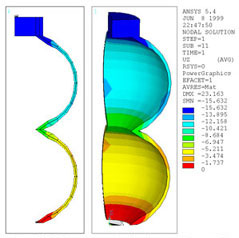
pneumatic muscle actuator has been taken back and developed. It has
been developed the FEA model for the simulation of the behaviour of
the muscle and it has been debugging a procedure for the rapid sizing
of the muscles. Besides a technology has been developed for the realization
of the muscles. Finally it has been set a control system based on
Fuzzy logic.
|