
|
|
| Ricerca |
|
Virtual Prototyping
Pneumatic Muscle Actuators Shape Memory Alloys (SMA) Actuators Bioengineering Finite Element Model Updating Structural Modifications Robotics |
|
|
| Robotics |
||||||||||
|
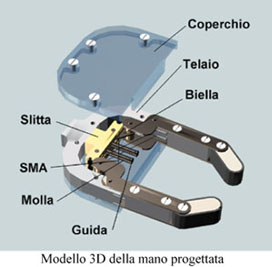
Small Gripper with Shape Memory Alloy Actuators (SMA)
SCARA Robot with flexible structure Parallel Robot driven by pneumatic actuators Parallel Robot with Shape Memory Alloy Actuators Parallel robot with SMA actuators with internal sensor effect
The constructive solution for the realization of the mechanism consists
in a structure to which the mobile elements are bound. The actuators in
SMA are in number of 4 in a symmetrical disposition to avoid couples of
rotation that would increase the friction strengths between sleigh and
guide. For the block of the SMA actuators on the structure and on the
sleigh, adjustable special systems of fixing have been developed. The
fingers have the particularity to be adjustable in operation of the
dimension of the object to grab. The springs are stopped on the guides
through two adjustable locks to allow regulations for the correct operation.
The hand has been realized in light material, Aluminium and Nylon, to
limit the weights. Last phalanx are dressed in rubber to improve the
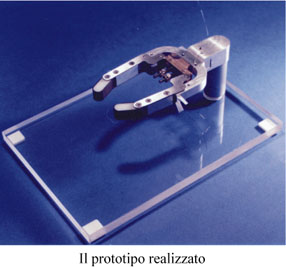
conditions of gripping. The dimensions are 19 mm x 60 mm x 80 mm. The
command for grip it happens with the passage of current through the
actuators that develop the necessary thermal power to the deformation
for Joule effect. Experimental verifications of the abilities of grip
have been effected. It has been commanded gripping of objects with
parallel faces and cylindrical objects with different dimensions and
weights.
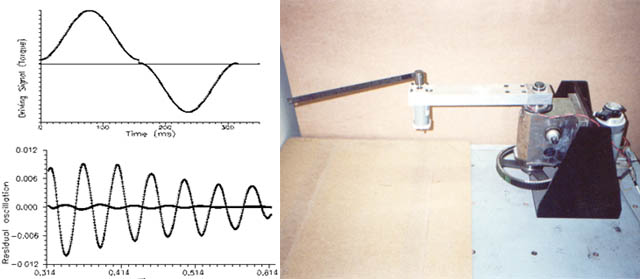
SCARA Robot with flexible structure
The objective is the improvement of the performances of the arms of robot
looking for very small times of positioning. In these cases classical
control goes to crisis for the impossibility to check the structural
vibrations. It is possible to adopt innovative strategies of control
that think about the vibration behaviour of the structure and that they
allow fast positioning without the onset of vibrations. An opportune
law kinematics is been individualized by to apply to the flexible link
which is able to effect brief positioning (time = 2 fundamental period
of the structure) with notable reduction of oscillations positioning.
In the first figure the torque law is showed and in the second figure
the comparison about the end oscillations positioning between a
classical law of control and with the proposed method. It notice a
reduction about 20 times of the peak-peak of the oscillation.
Parallel Robot driven by pneumatic actuators
The robot has an architecture parallel kinematics and it’s operated
with traditional pneumatic actuators. The control system is based on
logical Fuzzy. It's a machine with 3 degrees of freedom (DOF) with
dimensions around 2m x 0.8m x 1m. The working volume has form "lenticolar."
A static characterization of the robot has been effected. It has been
possible to characterize the precision of positioning and the repeatability
of the robot. A specific measurement equipment has been set-up. It consist
of high precision cube mounted on the moving plate of the robot, and fixed
trihedral gauge with six LVDT trasducers.
They result: Precision of positioning: 2mm Repeatability of positioning: 5.6 mm It has been made a model for the forecast of the dynamic behaviour of the robot. The model has been verified experimentally through measures of the frequencies proper of the structure in the different points inside the working volume. The model experimentally validate has been used for developing mapping, on the working volume, of the frequencies proper of the robot. 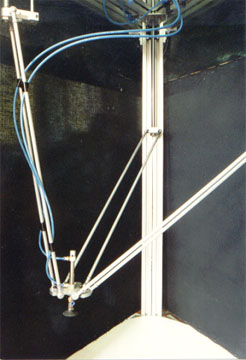 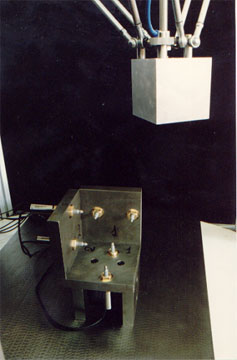
Parallel Robot with Shape Memory Alloy Actuators
The objective of this study is the realization of a small manipulator
to 3 DOF with kinematics parallel structure usable as device of
orientation or for the manipulation of small objects. The robot has
size of 180mm x 100mm x 100mm and a working volume of lenticular shape
of the height of 2 mm and diameter of 24 mm. For the movements it has
been used wires in Shape memory alloy (SMA) in Ni-Ti of the diameter
of 150 micron. The structure kinematics is parallel and the wires are
maintained in tension through a mechanical spring between the base
plate and the moving plate. It has set a control system in closed
loop. The thermal power is produced for Joule effect making to cross
from current the actuators themselves. The control law is a simple
proportional one and it uses a feedback signals of a position’s
sensor of resistance. The kinematics architecture foresees the actuators
connected to the base plate through cylindrical hinges to 120° and
the moving plate with spherical hinges. This solution has realized
with the actuators in isosceles triangle disposition. This configuration
besides furnishing a simple constructive solution to the functional
specifications, allows also an amplification of the movement of the
actuators. On the base of the project the prototype of the robot has
been realized. Some preliminary verifications of the movements of
the single axis and pursuit of trajectories have been effected that
require the control coordinated of everybody three axis.
Video of the robot (8Mb) 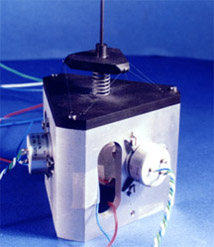
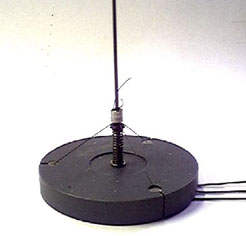
Parallel robot with SMA actuators with internal sensor effect
The objective has been the realization of a manipulator, of small
dimensions, to three degrees of freedom. For the driving it has been
used wires in SMA and the feedback control system it uses the internal
sensor effect of the material. In this way it has been possible to
realize a structure with small dimensions. They have been effectuated
movements of the single axis and movements coordinated that they
contemporarily involve all the axis. In the figure is showed the
realized prototype.
|